
服務(wù)熱線
0755-83044319

發(fā)布時(shí)間:2022-03-18作者來(lái)源:薩科微瀏覽:5112
CAN總線和RS485總線應(yīng)用概述
之前,PC與智能設(shè)備之間的通信主要使用RS232、RS485、以太網(wǎng)等,這取決于設(shè)備的接口規(guī)格。但是,RS232和RS485只能代表通信的物理介質(zhì)層和鏈路層。如果要實(shí)現(xiàn)對(duì)數(shù)據(jù)的雙向訪問(wèn),則需要編寫自己的通信應(yīng)用程序,但這些程序大多不能滿足 ISO/OSI 規(guī)范,只能實(shí)現(xiàn)。該程序是適用于單一設(shè)備類型的單一功能,并不具有通用性。
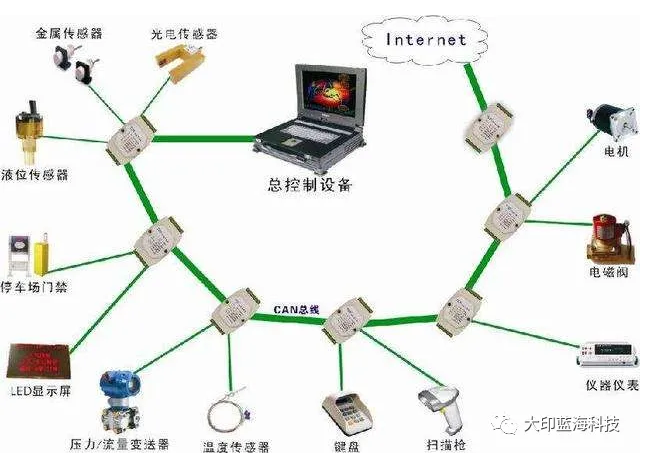
在由 RS232 或 RS485 設(shè)備組成的設(shè)備網(wǎng)絡(luò)中,如果設(shè)備數(shù)量超過(guò) 2 個(gè),則必須使用 RS485 作為通信介質(zhì)。如果 RS485 網(wǎng)絡(luò)上的設(shè)備要相互通信,只能通過(guò)“主”設(shè)備的傳輸來(lái)實(shí)現(xiàn)。這個(gè)主設(shè)備通常是一臺(tái)PC,在這個(gè)設(shè)備網(wǎng)絡(luò)上只允許有一個(gè)主設(shè)備,其余的都是從設(shè)備。現(xiàn)場(chǎng)總線技術(shù)基于ISO/OSI模型,擁有完整的軟件支持系統(tǒng),可以解決總線控制、沖突檢測(cè)和鏈路維護(hù)等問(wèn)題。現(xiàn)場(chǎng)總線設(shè)備自動(dòng)聯(lián)網(wǎng),并且沒有主/從設(shè)備拆分或允許多個(gè)主設(shè)備。在同一層次上,可以更換不同廠家的產(chǎn)品,實(shí)現(xiàn)設(shè)備互通。
現(xiàn)在的總線格式很多,CAN相對(duì)于其他的總線有什么特點(diǎn)?首先,就比較一下大家耳熟能詳?shù)?85總線, 485總線只是一種電平標(biāo)準(zhǔn),并不是什么新的協(xié)議,與232差不多,當(dāng)然這么說(shuō)不是很恰當(dāng),但是有助于大家理解。
CAN總線PK RS485總線
CAN(Controller Area Network)屬于現(xiàn)場(chǎng)總線的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。較之目前RS-485基于R線構(gòu)建的分布式控制系統(tǒng)而言,基于CAN總線的分布式控制系統(tǒng)在以下方面具有明顯的優(yōu)越性:
1)CAN控制器工作于多主方式,網(wǎng)絡(luò)中的各節(jié)點(diǎn)都可根據(jù)總線訪問(wèn)優(yōu)先權(quán)(取決于報(bào)文標(biāo)識(shí)符)采用無(wú)損結(jié)構(gòu)的逐位仲裁方式競(jìng)爭(zhēng)向總線發(fā)送數(shù)據(jù),且CAN協(xié)議廢除了站地址編碼,而代之以對(duì)通信數(shù)據(jù)進(jìn)行編碼,這可使不同的節(jié)點(diǎn)同時(shí)接收到相同的數(shù)據(jù),這些特點(diǎn)使得CAN總線構(gòu)成的網(wǎng)絡(luò)各節(jié)點(diǎn)之間的數(shù)據(jù)通信實(shí)時(shí)性強(qiáng),并且容易構(gòu)成冗余結(jié)構(gòu),提高系統(tǒng)的可靠性和系統(tǒng)的靈活性。而利用RS-485只能構(gòu)成主從式結(jié)構(gòu)系統(tǒng),通信方式也只能以主站輪詢的方式進(jìn)行,系統(tǒng)的實(shí)時(shí)性、可靠性較差。
2)CAN總線通過(guò)CAN控制器接口芯片82C250的兩個(gè)輸出端CANH和CANL與物理總線相連,而CANH端的狀態(tài)只能是高電平或懸浮狀態(tài),CANL端只能是低電平或懸浮狀態(tài)。這就保證不會(huì)出現(xiàn)像在RS-485網(wǎng)絡(luò)中,當(dāng)系統(tǒng)有錯(cuò)誤,出現(xiàn)多節(jié)點(diǎn)同時(shí)向總線發(fā)送數(shù)據(jù)時(shí),導(dǎo)致總線呈現(xiàn)短路,從而損壞某些節(jié)點(diǎn)的現(xiàn)象。而且CAN節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)關(guān)閉輸出功能,以使總線上其他節(jié)點(diǎn)的操作不受影響,從而保證不會(huì)出現(xiàn)象在網(wǎng)絡(luò)中,因個(gè)別節(jié)點(diǎn)出現(xiàn)問(wèn)題,使得總線處于“死鎖”狀態(tài)。
3)CAN具有完善的通信協(xié)議,可由CAN控制器芯片及其接口芯片來(lái)實(shí)現(xiàn),從而大大降低了系統(tǒng)的開發(fā)難度,縮短了開發(fā)周期,這些是只僅僅有電氣協(xié)議的RS-485所無(wú)法比擬的。
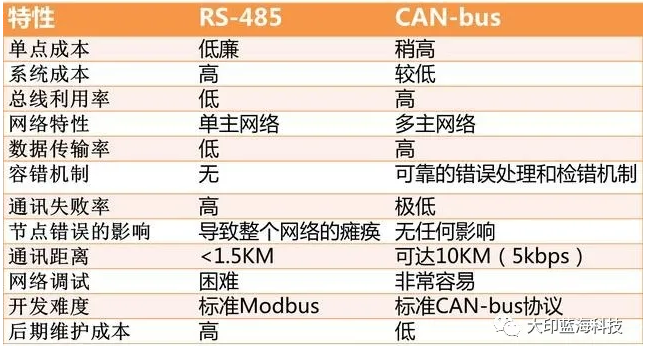
RS-485與CAN-bus的特性對(duì)比
一、支持通信方式不同
1、CAN總線:控制器局域網(wǎng)絡(luò),有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。
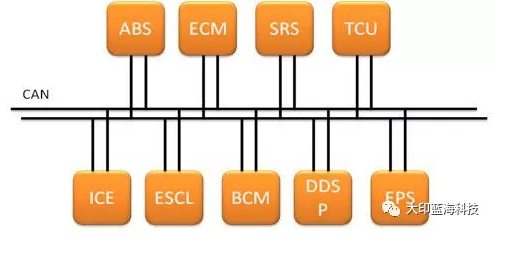
CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡(jiǎn)稱,是由研發(fā)和生產(chǎn)產(chǎn)品著稱的德國(guó)BOSCH公司開發(fā)了的,并最終成為國(guó)際標(biāo)準(zhǔn)(ISO11898)。是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的J1939協(xié)議。近年來(lái),其所具有的高可靠性和良好的錯(cuò)誤檢測(cè)能力受到重視,被廣泛應(yīng)用于汽車計(jì)算機(jī)控制系統(tǒng)和環(huán)境溫度惡劣、電磁輻射強(qiáng)和振動(dòng)大的工業(yè)環(huán)境。
2、RS485總線:采用半雙工工作方式,支持多點(diǎn)數(shù)據(jù)通信。
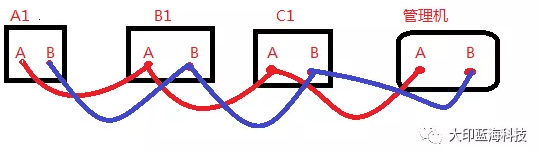
RS485采用半雙工工作方式,支持多點(diǎn)數(shù)據(jù)通信。RS485總線網(wǎng)絡(luò)拓?fù)湟话悴捎媒K端匹配的總線型結(jié)構(gòu)。即采用一條總線將各個(gè)節(jié)點(diǎn)串接起來(lái),不支持環(huán)形或星型網(wǎng)絡(luò)。rs-485采用平衡發(fā)送和差分接收,因此具有抑制共模干擾的能力。加上總線收發(fā)器具有高靈敏度,能檢測(cè)低至200mv的電壓,故傳輸信號(hào)能在千米以外得到恢復(fù)。有些rs-485收發(fā)器修改輸入阻抗以便允許將多達(dá)8倍以上的節(jié)點(diǎn)數(shù)連接到相同總線。rs-485最常見的應(yīng)用是在工業(yè)環(huán)境下控制器內(nèi)部之間的通信。
二、原理不同
1、CAN總線:過(guò)CAN收發(fā)器接口芯片82C250的兩個(gè)輸出端CANH和CANL與物理總線相連,而CANH端的狀態(tài)只能是高電平或懸浮狀態(tài),CANL端只能是低電平或懸浮狀態(tài)。
2、RS485總線:采用平衡發(fā)送和差分接收,因此具有抑制共模干擾的能力。加上總線收發(fā)器具有高靈敏度,能檢測(cè)低至200mv的電壓,故傳輸信號(hào)能在千米以外得到恢復(fù)。
三、特點(diǎn)不同
1、CAN總線:
已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的J1939協(xié)議。
CAN是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來(lái)傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。
CAN控制器根據(jù)兩根總線上的電位差來(lái)判斷總線電平。總線電平分為顯性電平和隱性電平。
顯性電平對(duì)應(yīng)邏輯電平為0,CAN-H與CAN-L之間的差為2.5V左右;隱性電平對(duì)應(yīng)邏輯電平為1,CAN-H與CAN-L之間的差為0V左右;在總線上顯性電平具有優(yōu)先權(quán)。
CAN協(xié)議特點(diǎn):
1、多主控制。
2、系統(tǒng)柔軟性。
3、通訊速度快,通訊距離遠(yuǎn)。
4、具有錯(cuò)誤檢測(cè)、錯(cuò)誤通知、錯(cuò)誤恢復(fù)功能。
5、故障封閉功能。
6、連接節(jié)點(diǎn)多。
2、RS485總線:
采用終端匹配的總線型結(jié)構(gòu)。即采用一條總線將各個(gè)節(jié)點(diǎn)串接起來(lái),不支持環(huán)形或星型網(wǎng)絡(luò)。
1、接口電平低,不易損壞器件。邏輯“1”以兩線間的電壓差為+(2~6)V表示;邏輯“0”以兩線間的電壓差為-(2~6)V表示。不易損壞接口電路的芯片,且該平與 TTL 電平兼容,可方便與TTL 電平兼容;
2、傳輸速率高。10 米時(shí), RS485 的數(shù)據(jù)[敏感詞]傳輸速率 的數(shù)據(jù)[敏感詞]傳輸速率 可達(dá) 35Mbps,在 1200m時(shí),傳輸速度100Kbps;
3、RS-485接口是采用平衡驅(qū)動(dòng)器和差分接收器的組合,抗共模干能力增強(qiáng),即抗噪聲干擾性好;
4、傳輸距離遠(yuǎn),支持節(jié)點(diǎn)多;
RS485要主站向只占發(fā)送報(bào)文時(shí),從站才會(huì)響應(yīng);而CAN的從站可以不需主站的報(bào)文可以主動(dòng)向主站發(fā)送報(bào)文,且CAN各子站之間也可以相互通訊,因此CAN通信尤其是子站(下位機(jī))顯得更易用和友好。CAN和RS485之間的差別類似于硬件底層的程序的區(qū)別,用于現(xiàn)場(chǎng)接線用的線沒關(guān)系,雖然名字上說(shuō)的某某總線的,每個(gè)子站CAN模塊里有主動(dòng)發(fā)送報(bào)文模塊的功能。
常見的工業(yè)控制CAN總線與RS485組網(wǎng)應(yīng)用設(shè)計(jì)實(shí)例
在工業(yè)控制領(lǐng)域中,往往是由一臺(tái)主機(jī)控制多臺(tái)從機(jī),上位機(jī)和下位機(jī)的遠(yuǎn)距離通信通過(guò)串行通信實(shí)現(xiàn)。本設(shè)計(jì)綜合實(shí)現(xiàn)了PC主機(jī)與DSP從機(jī)的RS-485遠(yuǎn)距離通信接口和DSP從機(jī)與CAN現(xiàn)場(chǎng)總線的數(shù)據(jù)傳輸接口設(shè)計(jì),同時(shí)具備主從機(jī)的遠(yuǎn)距離通信和CAN現(xiàn)場(chǎng)總線設(shè)備的實(shí)時(shí)通信功能,具有廣泛的應(yīng)用前景。在設(shè)計(jì)中充分發(fā)揮了DSP的CAN模塊和SCI模塊的作用,使得接口設(shè)計(jì)簡(jiǎn)單,工作更加可靠。
延伸閱讀
M-bus簡(jiǎn)稱儀表總線, 它具有兩總線無(wú)極性,布線無(wú)拓?fù)湟?總線自供電,抗干擾能力強(qiáng)、中繼級(jí)數(shù)多、帶終端級(jí)數(shù)多,簡(jiǎn)單、可靠等一 系列優(yōu)點(diǎn),是目前抄表系統(tǒng)應(yīng)用的[敏感詞]的總線。
M-BUS系統(tǒng)采用半雙異步通信,傳輸速度為300Bps到9600Bps。 傳輸距離比較遠(yuǎn),由超聲波熱量表的獨(dú)立鋰電池驅(qū)動(dòng)。 外部停電不影響其獨(dú)立運(yùn)行。 M-BUS總線因其結(jié)構(gòu)方便、運(yùn)行可靠而被廣泛應(yīng)用于歐洲抄表系統(tǒng)。
免責(zé)聲明:本文轉(zhuǎn)載自“大印藍(lán)海科技”,本文僅代表作者個(gè)人觀點(diǎn),不代表薩科微及行業(yè)觀點(diǎn),只為轉(zhuǎn)載與分享,支持保護(hù)知識(shí)產(chǎn)權(quán),轉(zhuǎn)載請(qǐng)注明原出處及作者,如有侵權(quán)請(qǐng)聯(lián)系我們刪除。
友情鏈接:站點(diǎn)地圖 薩科微官方微博 立創(chuàng)商城-薩科微專賣 金航標(biāo)官網(wǎng) 金航標(biāo)英文站
Copyright ?2015-2025 深圳薩科微半導(dǎo)體有限公司 版權(quán)所有 粵ICP備20017602號(hào)
