TOF是Time of flight的簡寫,直譯為飛行時間的意思。飛行時間技術在廣義上可理解為通過測量物體、粒子或波在固定介質中飛越一定距離所耗費時間(介質/距離/時間均為已知或可測量),從而進一步理解離子或媒介某些性質的技術。
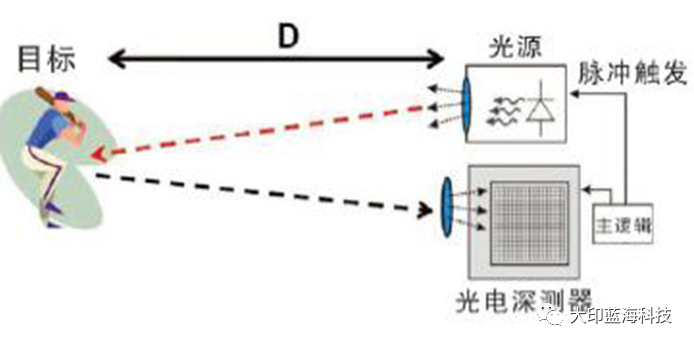
1 測距 最早應用該原理的器件是超聲測距儀。
ToF測距方法屬于雙向測距技術,它主要利用信號在兩個異步收發機(Transceiver)(或被反射面)之間往返的飛行時間來測量節點間的距離。傳統的測距技術分為雙向測距技術和單向測距技術。在信號電平比較好調制或在非視距視線環境下,基于RSSI(Received Signal Strength Indication,接收的信號強度指示)測距方法估算的結果比較理想;在視距視線環境下,基于ToF距離估算方法能夠彌補基于RSSI距離估算方法的不足。
ToF測距方法有兩個關鍵的約束:一是發送設備和接收設備必須始終同步;二是接收設備提供信號的傳輸時間的長短。為了實現時鐘同步,ToF測距方法采用了時鐘偏移量來解決時鐘同步問題。Renesas(Intersil)的ToF信號處理IC——ISL29501方案就是典型的ToF方案,可用于所有光照條件,并且實現了小型化和電池應用的低功耗。因為信號處理器技術使用了基于相位的ToF來應對檢測物體周圍的環境光的影響。
ISL29501 是一款創新的飛行時間 ( Time of Flight,簡稱 ToF ) 信號處理 IC,可與外部發射器(LED或激光)及光敏二極管一起構成完整的目標物檢測和距離測量解決方案。ISL29501 提供[敏感詞]的功能,包括超小尺寸、低功耗和出色的性能,是構成物聯網 ( IoT ) 的聯網設備以及消費移動設備和新興商業無人機應用的理想選擇。ISL29501 采用電源管理技術專長來節省功耗,并通過多項創新成果延長電池續航時間。可編程電流可達 255mA 的片上發射器 DAC 允許系統設計工程師選擇他們中意的用于驅動外紅外 ( IR ) LED 或激光的電流電平。該特性可幫助優化距離測量、目標物檢測和功率預算。ISL29501 的單次觸發模式有助于設計工程師定義針對初始目標物檢測和近似距離測量的采樣周期,從而節省功耗,而連續模式能夠更準確地測量距離。ISL29501 還執行系統校準,以適應外部元件由于溫度和環境光條件變化而引起的性能波動。
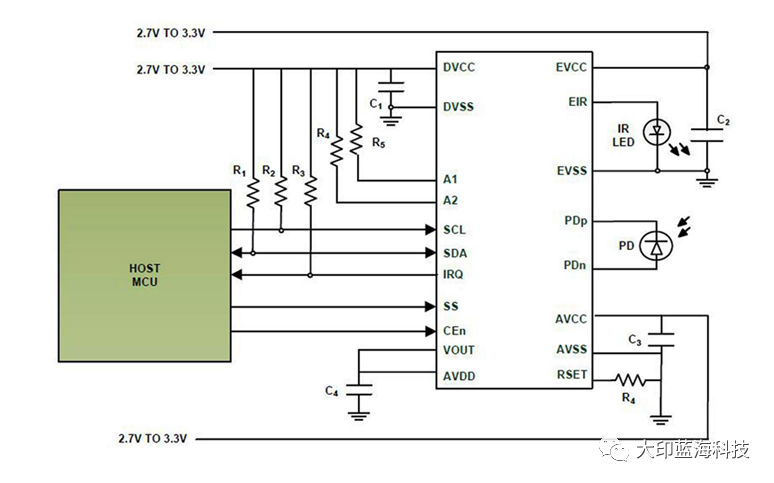
ISL29501典型應用電路
2 微電子學
飛行時間技術可用來估計電子遷移相關性質。起初該原理被用于測量低電導率的薄膜,后來進一步拓展到了常見半導體等。利用激光或電壓脈沖激發出來的大量電荷,該技術也能用于金屬-絕緣體-金屬(MDM)結構 [2] 或有機場效應晶體管 [3] 等領域。
3 醫學
在磁共振血管造影(Magnetic resonance angiography,MRA)領域,飛行時間法是一項主要的基礎技術。MRA可用于動脈瘤,血管狹窄等癥狀的判斷,或用于某些解剖學領域。
4 質譜學
在飛行時間質譜學領域,不同的離子可通過電場加速至同樣的動能,而其速度由質荷比決定。因此可用過飛行時間技術測量速度從而得知質荷比,并進一步得知動能等信息。
連續波ToF和脈沖ToF
對于不具有高精度要求的應用,CW系統可能比基于脈沖的系統更易于實現,因為光源不一定要非常短,且具有快速的上升/下降沿,盡管很難再現。在實踐中是完美的正弦波。然而,如果對精度的要求變得更加嚴格,則將需要更高頻率的調制信號,并且在實踐中可能難以實現。
由于照明信號的周期性,來自CW系統測量的任何相位測量都將每2π環繞一次,這意味著會有混疊距離。對于只有一個調制頻率的系統,混疊距離也將是[敏感詞]可測量距離。為了克服該限制,可以使用多個調制頻率來執行相位展開,其中,如果具有不同調制頻率的兩個(或多個)相位測量值與估計距離相一致,則可以確定對象的真實距離。這種多調制頻率方案還可用于減少多徑誤差,該誤差在來自物體的反射光在返回傳感器之前撞擊另一個物體(或在透鏡內部內部反射)時發生,從而導致測量誤差。
取決于其配置,CMOS ToF成像器往往具有更大的靈活性和更快的讀出速度,因此可以實現諸如感興趣區域(RoI)輸出之類的功能。
在溫度范圍內校準CW ToF系統可能比脈沖ToF系統容易。隨著系統溫度的升高,由于溫度變化,解調信號和照明將相對于彼此偏移,但是這種偏移只會影響測量距離,而偏移誤差在整個范圍內都是恒定的,并且深度線性度基本保持穩定。
連續波系統的缺點:
盡管CMOS傳感器與其他傳感器相比具有更高的輸出數據速率,但CW傳感器需要在多個調制頻率上進行四個相關函數采樣以及多幀處理才能計算深度。較長的曝光時間可能會限制系統的總體幀速率,或者可能導致運動模糊,從而可能會將其限制用于某些類型的應用程序。這種更高的處理復雜性可能需要外部應用程序處理器,這可能超出了應用程序的要求。
對于更長距離的測量或環境光水平較高的環境,將需要更高的連續光功率(與脈沖ToF相比);激光的這種連續照射可能會導致散熱和可靠性問題。
基于脈沖的ToF技術系統的優勢:
基于脈沖的ToF技術系統通常依賴在短積分窗口內以非常短的脈沖串發射的高能量光脈沖。這具有以下優點:
它使設計對環境光穩定的系統變得更加容易,因此更有利于室外應用。
較短的曝光時間可[敏感詞]地減少運動模糊的影響。
在基于脈沖的ToF系統中,照明的占空比通常比可比的CW系統的照明占空比低得多,因此具有以下優點:
在較低范圍的應用中,它降低了系統的整體功耗。過將脈沖猝發置于幀中與其他系統不同的位置,可以避免來自其他脈沖ToF系統的干擾。這可以通過在各種系統的幀中協調脈沖的放置或通過使用外部光電檢測器確定其他系統的脈沖的位置來完成。另一種方法是動態隨機化脈沖突發的位置,這將消除協調各個系統之間的時序的需要,但不會完全消除干擾。由于脈沖時序和寬度不需要統一,因此可以實施不同的時序方案以實現諸如更寬的動態范圍和自動曝光等功能。
基于脈沖的ToF技術系統的缺點:
由于透射光脈沖和快門的脈沖寬度需要相同,因此系統的定時控制需要非常精確,并且根據應用需要可能需要皮秒級的精度。為了獲得[敏感詞]效率,照明脈沖寬度必須非常短,但功率卻很高。因此,激光驅動器需要非常快的上升/下降沿(小于1 ns)。與CW系統相比,溫度校準可能更加復雜,因為溫度變化會影響單個脈沖寬度,不僅影響偏移和增益,還影響其線性。
關于dTOF和iTOF
了解了ToF的概念之后,讓我們再來深入了解一下兩類ToF的基本成像原理
dToF,全稱是direct Time-of-Flight。顧名思義,dToF直接測量飛行時間。dToF核心組件包含VCSEL、單光子雪崩二極管SPAD和時間數字轉換器TDC。Single Photon Avalanche Diode(SPAD)是一種具有單光子探測能力的光電探測雪崩二極管,只要有微弱的光信號就能產生電流。dToF模組的VCSEL向場景中發射脈沖波,SPAD接收從目標物體反射回來的脈沖波。Time Digital Converter(TDC)能夠記錄每次接收到的光信號的飛行時間,也就是發射脈沖和接收脈沖之間的時間間隔。dToF會在單幀測量時間內發射和接收N次光信號,然后對記錄的N次飛行時間做直方圖統計,其中出現頻率[敏感詞]的飛行時間t用來計算待測物體的深度, 。圖1是dToF單個像素點記錄的光飛行時間直方圖,其中,高度[敏感詞]的柱對應的時間就是該像素點的最終光飛行時間。
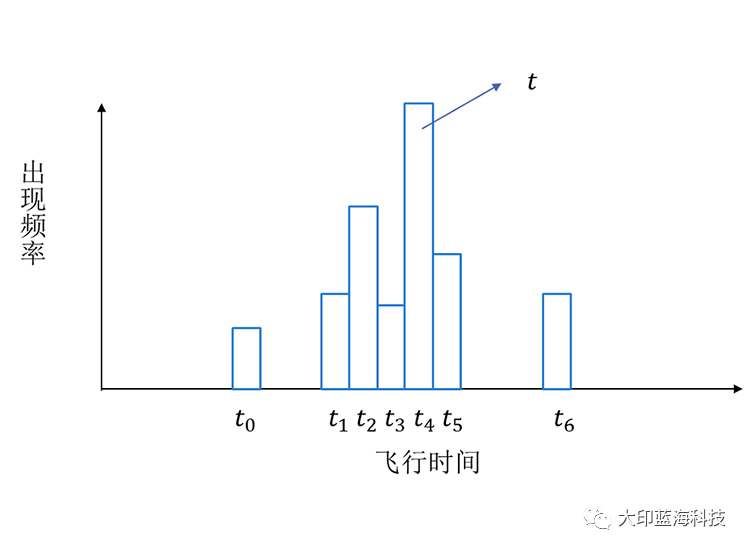
單像素記錄的光飛行時間直方圖示意圖
dToF的原理看起來雖然很簡單,但是實際能達到較高的精度很困難。除了對時鐘同步有非常高的精度要求以外,還對脈沖信號的精度有很高的要求。普通的光電二極管難以滿足這樣的需求。而dToF中的核心組件SPAD由于制作工藝復雜,能勝任生產任務的廠家并不多,并且集成困難。所以目前研究dToF的廠家并不多,更多的是在研究和推動iToF。
iToF的概念和dToF相對應,全稱是indirect Time-of-Flight,直譯就是間接光飛行時間。所謂間接,就是指iToF是通過測量相位偏移來間接測量光的飛行時間,而不是直接測量光飛行時間。
iToF向場景中發射調制后的紅外光信號,再由傳感器接收場景中待測物體反射回來的光信號,根據曝光(積分)時間內的累計電荷計算發射信號和接收信號之間的相位差,從而獲取目標物體的深度。如圖2所示。
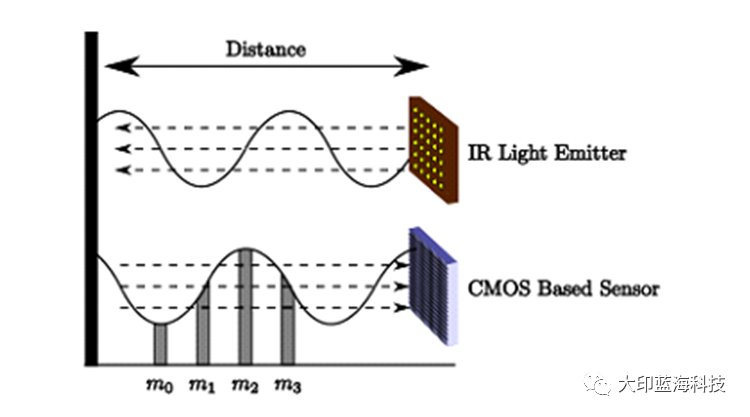
iToF成像原理示意圖
iToF模組的核心組件包含VCSEL和圖像傳感器。VCSEL發射特定頻率的調制紅外光。圖像傳感器在曝光(積分)時間內接收反射光并進行光電轉換。曝光(積分)結束后將數據讀出,經過一個模擬數字轉換器再傳給計算單元,最終由計算單元計算每個像素的相位偏移。iToF計算深度的方式通常是采用4-sampling-bucket算法,利用4個相位延遲為0°,90°,180°和270°的采樣信號計算深度。如圖3所示
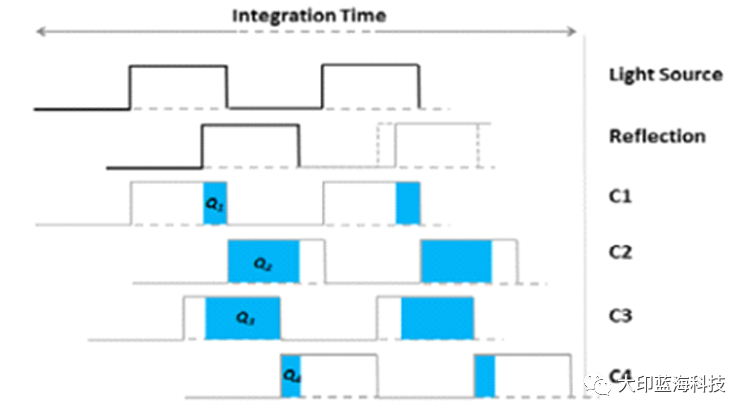
連續波調制方式測相位偏移原理示意圖
根據上述原理圖,可以得到相位偏移的計算公式, 。然后,再根據相位偏移計算深度, 。其中, 是調制信號的頻率, 是光速。
性能對比
dToF和iToF雖然都是利用光飛行時間技術,但是兩者在測距原理和硬件實現上都有差異。軟硬件的差異會導致這兩類ToF在各方面的性能表現上各有千秋。
衡量ToF的性能指標,需要考慮幾個方面。因為ToF是一個可以測距的相機,作為一個測距設備,基本的評價指標有測距精度和有效探測距離。其次,作為相機而言,圖像分辨率也是一個重要的評價指標。此外,由于ToF本身只能提供3D信息,它將來更多的發展是集成到3D相關的應用,比如3D建模、AR以及移動平臺。在集成到其他3D相關的應用時,尤其是移動端和機器人平臺,必須要考慮它的能耗和成本,以及在各種復雜場景下的抗干擾能力。以上的這些特性,決定了dToF和iToF有著各自適用的應用場景。
接下來,我們會從精度、有效探測距離、圖像分辨率、能耗、成本、抗干擾等7個方面,對比iToF和dToF的優劣。
精度 精度指真實深度值和相機的測量值之間的差,是衡量一個測量設備的基本指標。
對于dToF,由于它采用單光子雪崩二極管(SPAD),能夠在很短的時間間隔內測量吸收的光子數,最小能夠在 級的時間內產生響應電流。TDC的時間分辨率也高于 ,所以它的理論精度可以達到 。但是,由于雪崩過程存在量子噪聲和放大器噪聲,以及dToF中TDC模塊存在的固有噪聲,導致目前dToF的實際精度只能達到cm級,和iToF相近。但是,理論上dToF的測量誤差不會隨著測量距離的增加而增大。
iToF的測量精度和幾個因素有關,分別是調制光的頻率,光照功率以及積分時間。前文已經提到了iToF的深度計算公式 。由此,可以推出深度噪聲(精度) 。由于c對應光速,是一個固定值,所以深度精度和調制光的頻率、相位信噪比(phase SNR)有關。當相位信噪比一定時,頻率越高,深度噪聲越小,也意味著深度精度越高。
iToF的相位信噪比和傳感器接收到的光電流有關系。
其中,代表調制信號生成的電子, 代表調制光和環境光生成的電子總和, 代表電容的固有噪聲, 是調制對比度,描述傳感器分離和收集光電子的質量。所以, 調制光信號生成的電子數越多,相位信噪比越大,進而推出深度精度越高。增大 有兩種方式,一種是增大光照功率,另外一種就是延長曝光時間,也就是前文提到的積分時間。
總的來說,目前的iToF深度精度在 級,并且隨著測量距離的增大,反射光的強度減小,相位測量的信噪比減小,[敏感詞]誤差也會隨之增大。
有效探測距離 有效探測距離指相機能夠輸出可靠深度的距離范圍,可靠深度意味著該深度值和真實值的誤差小于一定閾值。舉個簡單的例子,假設測量誤差在2cm以內時,我們視作該深度值是可靠的。如果一個ToF模組測量5米的物體時,測量值是5.02米,誤差剛好達到了預先定義的極限。當物體位于5.01米時,測量值是5.22米,誤差超出了2cm。我們就可以說該ToF模組的有效探測距離是5米。
當然,限制ToF的有效探測距離的主要因素之一是相位模糊現象。
對于dToF而言,當測量距離較遠時,光飛行一個來回的時間超過了兩次連續發射脈沖的間隔,傳感器在發射第二個測量信號后,才接收到[敏感詞]個測量信號的反射波,就會把該反射波錯認為是第二個測量信號的近距離反射波,這時就會出現相位模糊現象。如圖4所示。圖4中case1表示的是近距離場景下dToF的測距原理圖,case2表示的是遠距離場景下,發生相位模糊現象的測距原理圖。
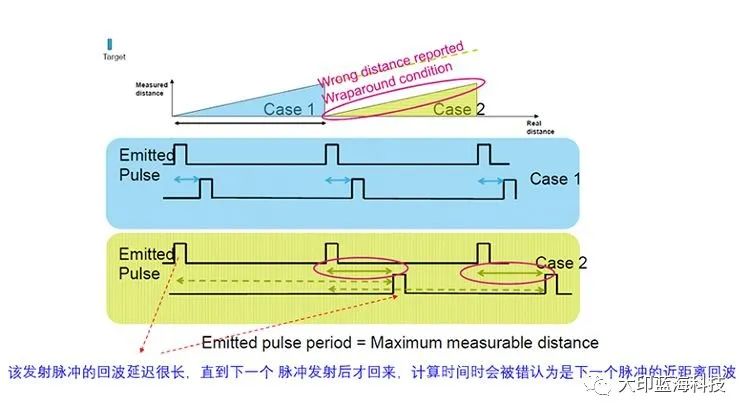
dToF脈沖測距原理示意圖
對于iToF而言,深度是通過相位偏移計算得到的,而相位偏移是通過一個反正切函數得到的 。反正切函數的返回值只會落在 ,所以測量深度的返回值也只會落在 。換言之,即使實際距離超出了 ,最終iToF的輸出深度也會落在 。這是由于三角函數的周期性帶來的相位模糊。
dToF會受到測量頻率(相鄰兩次測量的間隔時間)限制,iToF的有效探測距離會受到調制光的頻率限制。dToF在測量遠距離物體時,可以適當增加兩次測量之間的間隔,減少測量次數。但是,減少測量次數會同時降低測量精度,相當于是用精度換取有效探測距離。而iToF也可以通過降低調制光的頻率,從而犧牲一定的測量精度以獲得更遠的有效探測距離。
對于iToF而言,可以利用雙頻解決相位模糊現象。利用兩個不同頻率的測量數據去求解相位模糊度,從而恢復正確深度值。借助雙頻測量可以同時實現高精度測量和高有效探測距離。
圖像分辨率 dToF的圖像分辨率受到SPAD的限制,分辨率一般小于QVGA(320*240像素),新款iPad Pro的dToF分辨率有所提升,但是具體大小還未可知。
iToF技術發展相對成熟,圖像的分辨率大多都達到了QVGA(320*240像素),上海數跡的TC-S系列相機的分辨率可以達到VGA(640*480像素)。微軟[敏感詞]的Kinect有多個圖像分辨率,[敏感詞]可以達到1024*1024像素。
能耗 從發射信號來看, dToF則采用 級的脈沖激光,iToF目前大多采用連續波調制。相比較而言,脈沖波能夠達到超低占空比,所以功耗也較低。
從光照模式來看,由于dToF的測量精度不會隨著測量距離的增大而降低,所以功耗也會相對較低。反之,iToF目前采用的大多是面光發射方式。并且,隨著測量距離的增大,iToF需要提高光照功率或者延長曝光時間來獲取更高的精度,所需的功耗也會大幅增加。
成本 dToF采用的是數字電路架構,不需要模數轉換。iToF采用的是模擬電路結構,需要模數轉換芯片。
對于整體的硬件架構而言,dToF的核心組件SPAD的制作工藝復雜,現有的資源少。iToF沒有這方面的顧慮。
在系統集成方面, dToF還需要額外的時間處理電路,系統集成難度較高。iToF的系統集成容易,不需要額外的測量電路。
抗環境干擾 環境干擾包括場景中環境光干擾、多路徑反射光干擾以及不同表面灰度等影響。這一類環境干擾發生在外界,和ToF本身的關系不大,環境干擾的差異主要是由不同ToF的測距原理引起的。
dToF單幀深度圖獲取時,會經歷多次重復測量,并且采用時間直方圖統計的方式計算飛行時間,比較容易區分信號中的干擾成分。抗環境干擾能力更強。
iToF在曝光階段,部分環境光混雜在調制光中被傳感器接收,然后計算相位偏移。無法從單次測量的結果中區分出環境光引起的干擾。環境光越強,相應的,引起的深度誤差也越大。
應用場景 dToF功耗低,并且體積小巧,更加適合工業機器人等需快速進行測距避障檢測的應用,以及其他在空間受限的緊湊型設計中。
dToF抗環境干擾表現比較好,目前在戶外場景下的測距精度比iToF更加高,在戶外應用場景中也比較占優。
dToF的時間分辨率高,測量距離增大時精度不會大幅衰減,能耗也不會大幅提升,在AR應用中的優勢也比較顯著。
iToF的圖像分辨率較高,在物體識別,3D重建以及行為分析等應用場景中能夠重現場景中更多的細節信息,在機器人、新零售等應用領域占優。

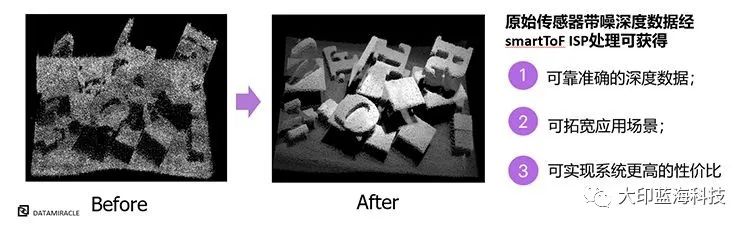
3D ISP
dToF和iToF兩者的目標都是輸出一幅高質量的深度圖像,所以兩者都需要深度數據層面的濾波和噪聲修正,比如空域濾波、點云域的噪聲濾波以及非一致性像素校準等。此外,兩者都擁有透鏡成像系統,所以無論是dToF還是iToF,都需要透鏡失真補償。硬件的溫度變化帶來的噪聲也同時存在于兩種ToF中,所以溫度補償也是兩者所必需的。
dToF是發射脈沖波,而不是特定頻率的調制波,所以dToF不需要做和調制光的頻率相關的處理,包括頻率校準、自動頻率選擇、高動態范圍(HDR)。但是dToF的發射脈沖也有一定的頻率,即相鄰兩個發射脈沖之間的時間間隔,dToF的頻率校準和發射脈沖的頻率相關。dToF僅僅輸出深度圖,而iToF同時輸出深度圖和幅值圖,所以dToF不需要做幅值校準。
此外,由場景干擾引起的多徑、相位模糊、運動模糊、內反射等都是兩者所共有的問題,雖然dToF因為成像原理的特性具有更好的抗環境干擾能力,但是還是會受到這一類場景干擾的影響。不過不同的是,因為dToF和iToF的成像原理不同,兩者所需要的深度修正方式也會有所差異。
dToF和iToF兩者因為測距原理和硬件架構的不同,各方面的性能互有優劣,適用場景也不盡相同。兩者均面臨場景的適應性,如何在任意場景下獲取可靠和準確的深度數據是非常大的技術挑戰,是ToF技術普及的關鍵。ToF應用技術的普及有賴于3D ISP增強引擎來消除干擾,降低功耗,提高實時性能;需要面向3D行業的ISP IP及中間件,有力支撐上層應用。所以說3D ISP是3D成像市場爆發的必要條件。數跡智能團隊正在研發3D ToF ISP Smart3D-ISP,以ISP技術為核心系統性地提升無論是dToF還是iToF的性能并降低功耗和成本是多年來的研發目標,將我們的3D ToF技術植入每部手機、每輛汽車、每個機器人、每臺家電,從而改變機器對世界的“看法”,實現深度的智能。
免責聲明:本文轉載自“大印藍海科技”,本文僅代表作者個人觀點,不代表薩科微及行業觀點,只為轉載與分享,支持保護知識產權,轉載請注明原出處及作者,如有侵權請聯系我們刪除。